This is my first attempt to bring my robot outside the "robot room", i guide him by webserver from roborealm by another desktop computer. It's fun and it's like flight simulator...
at this stage there are no sensors.
i'm using 2 webcams (one is build in the laptop, and the other is logitech cam, on the top of the pole)
This is him coming back from roaming.
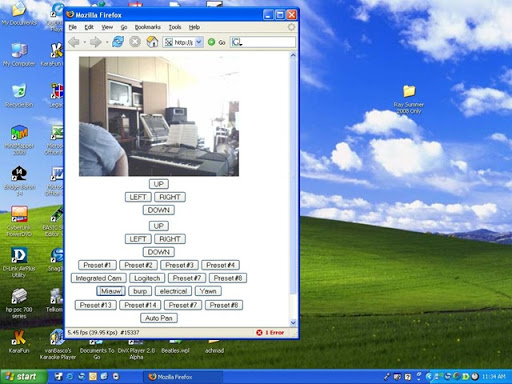
This is the interface for remoting the robot.
Did you see the rope around the laptop.. i still cannot find a decent bracket to attach my laptop to the robot.. the rope is the safety belt now..

0 komentar:
Posting Komentar