Yang saya pakai adalah : T-568B
dan kalau di test di network cable tester... tetap berurutan 1 s/d 8 normal


mosquitto_pub -d -t hello/world -m "Hello, MQTT. This is my first message."
mosquitto_sub -d -t hello/worldKalau dari python seperti ini:
import mosquitto
mqttc = mosquitto.Mosquitto("python_pub")
mqttc.will_set("/event/dropped", "Sorry, I seem to have died.")
mqttc.connect("127.0.0.1", 1883, 60, True)
mqttc.publish("hello/world", "Hello, World!")

Mau mobil remote control berjalan lebih lancar di permukaan yang tidak rata? berikan rantai tank.
Ini ada url yang suka saya pelajari.
Beberapa hari yang lalu saya teringat soal web yang membahas docking, ini ternyata ketemu lagi.
lumayan buat memperhatikan implementasi.
http://www.schursastrophotography.com/robotics/dockinglogic.html
#include <Wire.h>
/*
CMPS03 compass reader
language: Wiring/Arduino
Reads data from a Devantech CMP03 compass sensor.
Sensor connections:
SDA - Analog pin 4
SCL - Analog pin 5
created 5 Mar. 2007
by Tom Igoe
*/
// include Wire library to read and write I2C commands:
// the commands needed for the SRF sensors:
#define sensorAddress 0x60
// this is the memory register in the sensor that contains the result:
#define resultRegister 0x02
void setup()
{
// start the I2C bus
Wire.begin();
// open the serial port:
Serial.begin(9600);
}
void loop()
{
// send the command to read the result in inches:
setRegister(sensorAddress, resultRegister);
// read the result:
int bearing = readData(sensorAddress, 2);
// print it:
Serial.print("bearing: ");
Serial.print(bearing/10);
Serial.println(" degrees");
// wait before next reading:
delay(70);
}
/*
setRegister() tells the SRF sensor to change the address pointer position
*/
void setRegister(int address, int thisRegister) {
// start I2C transmission:
Wire.beginTransmission(address);
// send address to read from:
Wire.send(thisRegister);
// end I2C transmission:
Wire.endTransmission();
}
/*
readData() returns a result from the SRF sensor
*/
int readData(int address, int numBytes) {
int result = 0; // the result is two bytes long
// send I2C request for data:
Wire.requestFrom(address, numBytes);
// wait for two bytes to return:
while (Wire.available() < 2 ) {
// wait for result
}
// read the two bytes, and combine them into one int:
result = Wire.receive() * 256;
result = result + Wire.receive();
// return the result:
return result;
}
Setelah mengulik di laptop, hacking infrared IRDA port yang di rubah menjadi Serial pada tulisan saya di sini. Saya merasakan ada keterbatasan pada hack ini. Remote Control harus benar-benar di arahkan ke arah laptop. Dan faktor ini sangat mempengaruhi kenyamanan.
Kalau kita lagi santai biasanya susah mengarahkan remote kearah laptop karena posisi kita sudah tertentu. Faktor arah dari remote seharusnya mempunyai toleransi terhadap posisi kita.
Signal harus datang dari arah depan laptop, kalau agak menyamping pembacaan dari signal agak kurang tepat.
Nah di tulisan ini saya coba uraikan tentang pembuatan remote receiver. Saya coba browsing di toko-toko, hardware infrared untuk PC menggunakan USB, harganya cukup mahal bisa sampai 300an ribu. (Beserta remotenya). Akhirnya saya memutuskan untuk membeli SPC INFRARED Transceiver, modul elektronik yang dapat menerima dan mengirim signal dari Innovative Electronics. Harganya tidak terlampau murah, 85 ribu rupiah. Tadinya masih mau membuat rangkaian sendiri. sebenarnya tidak susah.. kalau mau merakit sendiri mungkin harga receivernya saja bisa di buat sekitar 20 ribuan.
Yah karena mungkin bisa di pakai untuk aplikasi robotika saya juga. Jadi saya beli aja modul SPC itu.
SPC Infrared ini di hubungkan melalui serial port pada pc kita menggunakan kabel yang sudah di sediakan. Catu dayanya saya ambil dari sisa usb port, menggunakan bekas kabel mouse yang rusak.
Set jumper untuk menggunakan antarmuka RS323.
Karena saya menggunakan remote bekas TV saya dulu (bermerek Philips). Set jumper di SPC ke Philips data.
Modul ini efisien apa bila anda menggunakan remote control yang compatibel dengan merek PHILIPS, PANASONIC atau SONY.
Apabila anda menggunakan remote lain, sebenarnya bisa juga tapi anda harus lebih pandai mengolah raw data dari remote tersebut.
Apabila anda menggunakan remote yang tadi saya sebut. Semuanya jauh lebih mudah karena modul SPC nya sudah mengolah data remotenya. Jadi port serial sudah menerima data yang sudah di 'parse'.
Set Comport #1 baud rate 9600 dan sisanya ikutin di sini.

Download Serial Watcher untuk melihat apakah ada signal yang tertangkap oleh modul SPC

Nah lalu install program untuk mengatur PC. Anda bisa pakai WINLIRC (harus di learn dulu tiap-tiap tombilnya).
Atau pake shareware UICE, PCREMOTECONTROL, GIRDER. Semuanya bisa di pakai tapi semuanya harus di program dulu agar dapat sesuai dengan keinginan kita.
Tiap software tersebut ada kekurangan dan kelebihannya. Saya suka UICE karena ada fasilitas OSD nya. (On Screen Display). Jadi saya dapat membuat Menu-menu untuk memilih aplikasi apa yang mau saya kontrol.
Anda dapat mengontrol Winamp, windows media player, ataupun program lainnya menggunakan remote biasa yang sudah tersedia di rumah anda.
Happy Hacking!.
This is my first attempt to bring my robot outside the "robot room", i guide him by webserver from roborealm by another desktop computer. It's fun and it's like flight simulator...
at this stage there are no sensors.
i'm using 2 webcams (one is build in the laptop, and the other is logitech cam, on the top of the pole)
This is him coming back from roaming.
This is the interface for remoting the robot.
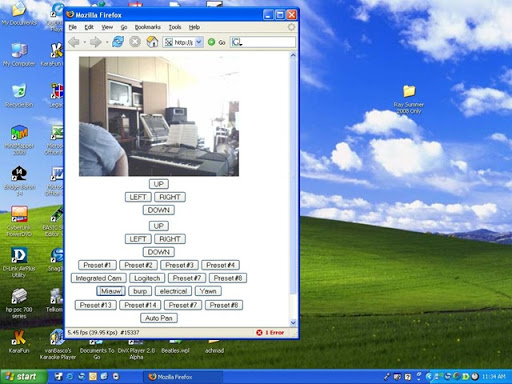
Did you see the rope around the laptop.. i still cannot find a decent bracket to attach my laptop to the robot.. the rope is the safety belt now..

untuk proses mencobanya saya memakai DT-51 Min System 3.3 untuk mengecek bagaimana cara bekerjanya. si DT-51 terhubung dengan 9v yang sudah agak lemah, dan Relay Board menggunakan 6v batterai ABC, semuanya berjalan lancar dengan sample yang sudah di berikan dari CDnya.
Lalu barulah saya pindahkan ke basic stamp dengan menggunakan resistor 220ohm sebagai jaga-jaga arus balik ke PIN.
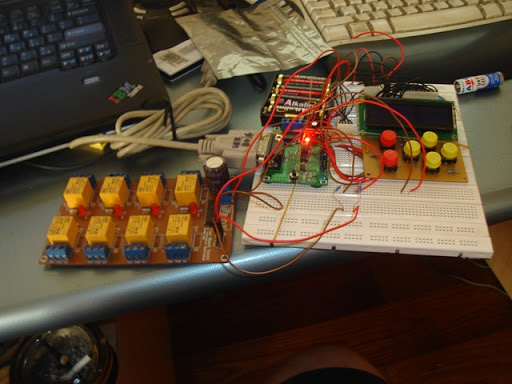
Konfigurasi ini menggunakan batterai 6v (4x AA) dan menghubungkan board secara serial.
Teknik coding di Basic Stamp Editor hanya menggunakan:
HIGH 6 ' untuk menyalakan pin no.6
PAUSE 1000 ' untuk 1 detik
LOW 6 ' matikan pin 6
END
PS: lihat manual.. Input 1 pada Relay Board harus di hubungkan dengan ground.

Konfigurasi dengan DT-51 seperti ini dapat berjalan dengan EXAMPLE.ASM sebagai programnya. Menggunakan baterai 9v untuk DT-51 dan 6v untuk SPC DC nya. (ground tetap di hubungkan bersama) Kabel pita dari PORT C dan PORT 1 ke tempat yang sama.
Perhatikan arah kabel pita.
Tetapi saya belum bisa merangkai I2C command melalui basic stamp. jadi SPC DC Motor saya hubungkan seperti ini.
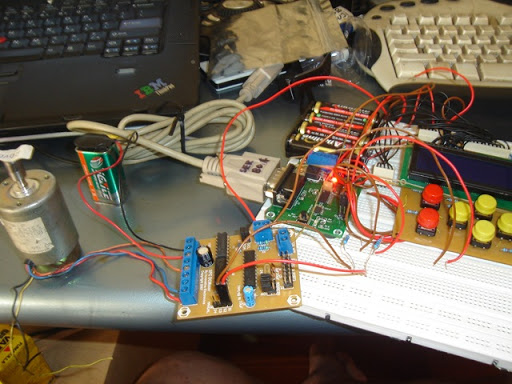
tetap di beri resistor 220 ohm untuk menjaga pin. SPC DC motor controllernya di beri tegangan yang sama dengan Basic Stamp (6v). Tetapi Vmotor saya berikan baterai 9v untuk memutar motor lebih kuat.
(saya belum mencoba dengan 12 v)
Cara memprogramnya justru di berikan LOW pada pin yang bersangkutan.
LOW 6 '(start motor)
LOW 7 '(searah jarum jam)
HIGH 6 '(matikan motor)
